|
I am a Computer Science Ph.D. student at Portland State University, advised by Prof. Atul Ingle. My research interests include 3D computer vision, computational Imaging, and Design of Synthetic dataset generation pipelines. Previously, I was a Senior Research Fellow at the Computer Vision Graphics and Imaging Lab of IIT Gandhinagar, supervised by Prof. Shanmuganathan Raman. Before that I worked at the Autonomous Robots and Multi-robot Systems (ARMS) Lab of the Indian Institute of Technology Bombay as a Research Associate supervised by Prof. Leena Vachhani and Prof. Abhishek Gupta. |

|
|
|
|
Soumyaratna Debnath, Ashish Tiwari, Kaustubh Sadekar, Shanmuganathan Raman, CVPR, 2025 We introduce RASP, a differentiable-rendering-based framework for optimizing 3D object arrangements using shadow-guided constraints, enabling efficient packing, part assembly, and multi-view anamorphic art creation. |
|
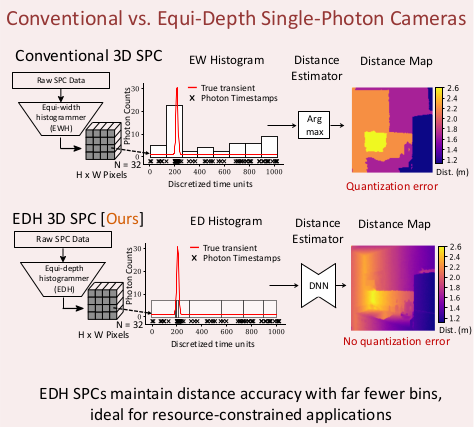
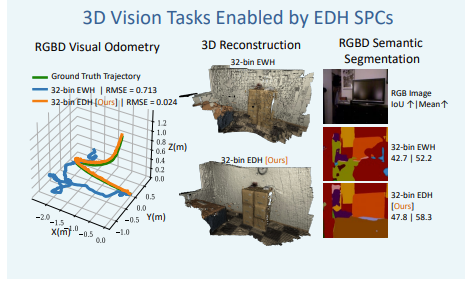
Kaustubh Sadekar, David Maier, Atul Ingle, ECCV, 2024 Our work paves the way towards lower bandwidth and reduced in-pixel memory requirements for single-photon 3D cameras, making them attractive for resource-constrained 3D vision applications. |
|
Kaustubh Sadekar, David Maier, Atul Ingle, CVPR (CCD Workshop), 2024 poster/ video We propose a new 3D imaging technique to reduce the bandwidth and in-pixel memory requirements for single-photon 3D cameras. |
|
Kaustubh Sadekar, Ashish Tiwari, Shanmuganathan Raman, WACV, 2022 project page/ arXiv/ video We use differentiable rendering to create artistic 3D sculptures for shadow art effects. |
|
Kaustubh Sadekar, Ashish Tiwari, Prajwal Singh, Shanmuganathan Raman, ICPR, 2022 project page/ arXiv/ video We propose a large scale dataset of 1 Million challenging images for the task of hand written document image binarisation (HDIB) with accurate segmentation groundtruth. |
|
Prajwal Singh, Kaustubh Sadekar, Shanmuganathan Raman, arXiv, 2021 project page/ arXiv/ video We propose a large scale dataset of 1 Million images for the task of hand written document image binarisation with accurate segmentation groundtruth. |
|
|
|
project page Development of a low-cost lensless camera and its calibration. |
|
|
project page Physics-based modeling of SPAD sensor measurements simulating the effect of photon randomness, laser characteristics, and background photons. |

|
project page This project aims to create a custom RGB-D stereo camera using low cost USB cameras and providing library for calibration, stereo depth estimation and RGB-D to 3D pointcloud reconstruciton. |
|
project page A Python implementation of the Kinect Fusion algorithm with PyTorch based vectorization to enable GPU acceleration capabilities. |
|
project page Virtual camera classes in Python and C++ for various omnidirectional/fisheye/wide-lens camera models with ROS support. |
|
Kaustubh Sadekar, Malav Bateriwala, Vishruth Kumar Project Page / Competetion Results A OAK-D depth camera based system that guides the user to target a object using object detection and depth estimation. OpenCV Spatial AI Competetion Phase 1 Winners |
|
A series of fun projects explaining classical computer vision and image processing topics like calibration, camera projection, color detection etc. |
|
Python and C++ implementation for perspective camera projection using OpenCV and Numpy to create an interactive 3D window effect. Also implimented a Kalman filter for smooth face traciking. |
|
A low cost 3DOF robotic sketching arm was fabricated and developed using inexpensive servo motors. A visual feedback system, utilizing ArUco markers, was designed for efficient performance, and closed loop position control of the arm joints was implemented. |
|
Created a virtual camera model and used mesh based warping to generate sum fun effects. |
|
Used OpenCV for color based segmentation to create a fun application of invisibility cloak. |

|
Used color based segmentation to create a fun application to play drums in air! |
|
Thanks to Jon Barron for this awesome template and Pratul Srinivasan for additional formatting. |