Converting equirectangular and cubemap image to perspective view image¶
A perspective image is usually considered with a 90 ° field of view but the code supports other values of FOV in the horizontal and vertical direction. One of the most common applications of this type of conversion is to create a 360 ° image/video viewer, we can also use this method to generate multiple novel pinhole camera images from a single 360 ° image. This is also useful when generating a VR experience or game using skyboxes.
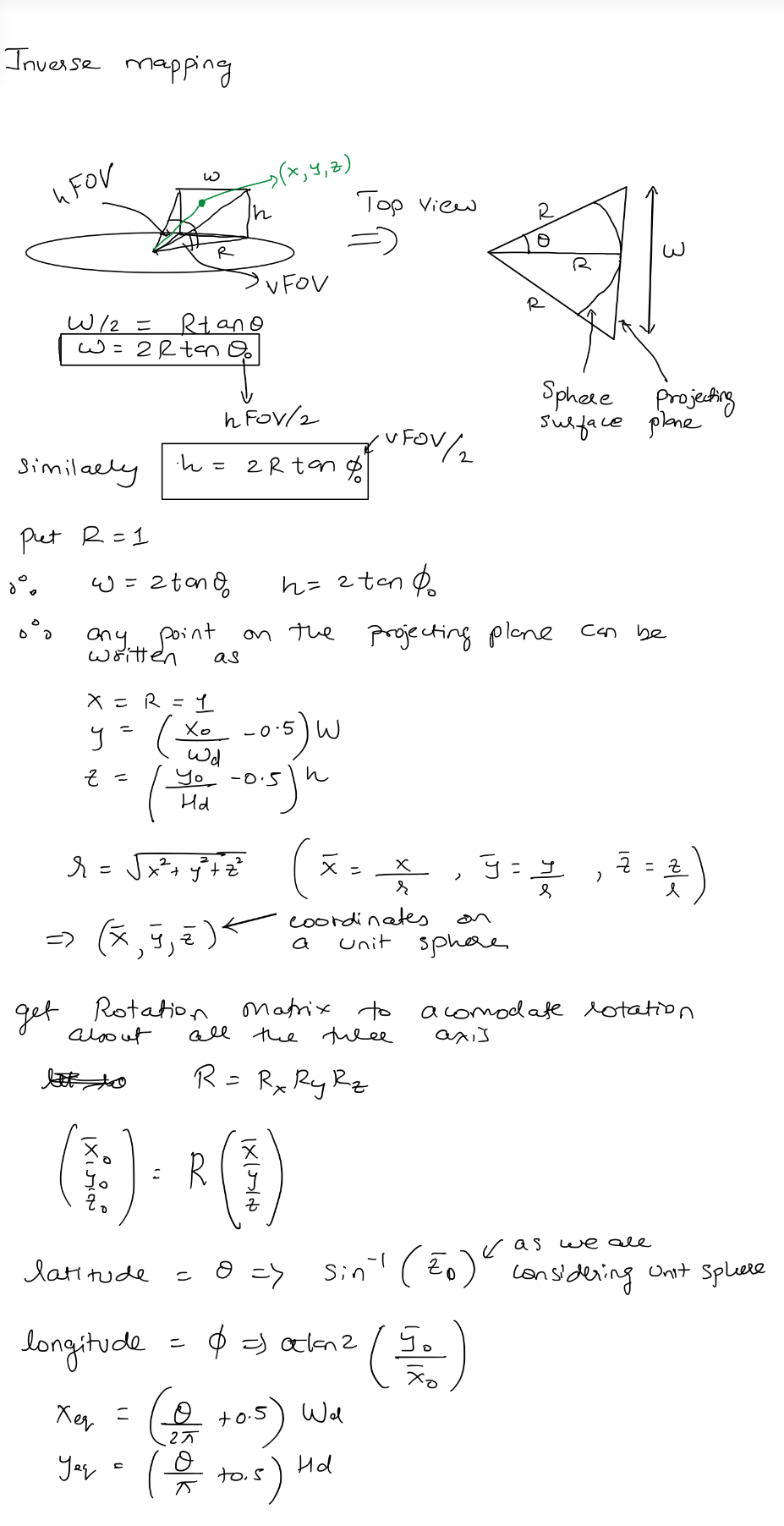
A simplified version of the math behind such conversions is explained in the following figure, to know more mathematical details refer to [1].
Python Example¶
Example code for equirectangular to perspective conversion¶
-
fisheyeUtils.eqruirect2persp(img, FOV, Theta, Phi, Hd, Wd)¶ - Parameters
img – input cubemap image
FOV – field of view (in horizontal direction)
Theta – Viewing angle wrt z axis
Phi – VIewing angle wrt y axis
Hd – Output image height
Wd – Output image width
#!/usr/bin/env/python
import cv2
import numpy as np
import math
import time
import sys
from omnicv import fisheyeImgConv
# path to the input equirectangular image
Img_path = sys.argv[1]
equiRect = cv2.imread(Img_path)
cv2.namedWindow("cubemap",cv2.WINDOW_NORMAL)
cv2.imshow("cubemap",equiRect)
cv2.waitKey(0)
outShape = [400,400]
inShape = equiRect.shape[:2]
mapper = fisheyeImgConv()
FOV = 90
Theta = 0
Phi = 0
Hd = outShape[0]
Wd = outShape[1]
persp = mapper.eqruirect2persp(equiRect,FOV,Theta,Phi,Hd,Wd)
cv2.imshow("cubemap",persp)
cv2.waitKey(0)
Example code for cubemap to perspective conversion¶
-
fisheyeImgConv.cubemap2persp(self, img, FOV, Theta, Phi, Hd, Wd)¶ - Parameters
img – Input equirectangular image
FOV – Field of view (in horizontal direction)
Theta – Viewing angle wrt z axis
Phi – Viewing angle wrt y axis
Hd – Output image height
Wd – Output image width
#!/usr/bin/env/python
import cv2
import numpy as np
import math
import time
import sys
from omnicv import fisheyeImgConv
Img_path = sys.argv[1]
equiRect = cv2.imread(Img_path)
cv2.namedWindow("cubemap",cv2.WINDOW_NORMAL)
cv2.imshow("cubemap",equiRect)
cv2.waitKey(0)
outShape = [400,400]
inShape = equiRect.shape[:2]
mapper = fisheyeImgConv()
FOV = 90
Theta = 0
Phi = 0
Hd = outShape[0]
Wd = outShape[1]
persp = mapper.cubemap2persp(equiRect,FOV,Theta,Phi,Hd,Wd)
cv2.imshow("cubemap",persp)
cv2.waitKey(0)
C++ Example¶
Example code for equirectangular to perspective conversion¶
-
fisheyeImgConv::equirect2persp(const cv::Mat &img, cv::Mat &dstFrame,float FOV, -
float THETA, float PHI, int Hd, int Wd); - Parameters
img – input cubemap image
FOV – field of view (in horizontal direction)
THETA – Viewing angle wrt z axis
PHI – VIewing angle wrt y axis
Hd – Output image height
Wd – Output image width
dstFrame – Output images
#include<iostream>
#include<opencv2/opencv.hpp>
#include"../omnicv/utils.hpp"
#include <opencv2/core/core.hpp>
// Creating the display window
int H = 500;
int W = 500;
std::string WINDOW_NAME{"viewer"};
int main()
{
cv::namedWindow(WINDOW_NAME,CV_WINDOW_NORMAL);
cv::Mat frame;
cv::Mat outFrame;
frame = cv::imread("../data/equirect_temp1.jpg");
cv::imshow(WINDOW_NAME,frame);
cv::waitKey(0);
fisheyeImgConv mapper1;
mapper1.equirect2persp(frame,outFrame,90,120,45, 400,400);
return 0;
}
Example code for cubemap to perspective conversion¶
-
fisheyeImgConv::cubemap2persp(const cv::Mat &img1, cv::Mat &dstFrame,float FOV, -
float THETA, float PHI, int Hd, int Wd); - Parameters
img – Input equirectangular image
FOV – Field of view (in horizontal direction)
Theta – Viewing angle wrt z axis
Phi – Viewing angle wrt y axis
Hd – Output image height
Wd – Output image width
dstFrame – Output image
#include<iostream>
#include<opencv2/opencv.hpp>
#include"../omnicv/utils.hpp"
#include <opencv2/core/core.hpp>
// Creating the display window
int H = 500;
int W = 500;
std::string WINDOW_NAME{"viewer"};
int main()
{
cv::namedWindow(WINDOW_NAME,CV_WINDOW_NORMAL);
// cv::resizeWindow(WINDOW_NAME, 400, 400);
cv::Mat frame;
cv::Mat outFrame;
frame = cv::imread("../data/cubemap_dice.jpg");
cv::imshow(WINDOW_NAME,frame);
cv::waitKey(0);
fisheyeImgConv mapper1;
mapper1.cubemap2persp(frame,outFrame,90,120,45, 400,400);
return 0;
}
For a more detailed example refer to the following code. for equirectangular to cubemap projection and refer this code.
Equirectangular to perspective image |
Cubemap to perspective image |
|---|---|
|
|
Reference¶
[1] Araújo, António. (2018). Drawing Equirectangular VR Panoramas with Ruler, Compass, and Protractor. Journal of Science and Technology of the Arts. 10. 10.7559/citarj.v10i1.471.