Documentation for ROS Nodes¶
OmniCV ROS Nodes¶
ROS is a common platform used by industry and academia for research and deployment of various robotics and vision applications. Running different ROS nodes in parallel helps in improving real-time performance. ROS also makes it easy to integrate different smaller modules into a complex project making it easy to debug and maintain. In several robotics applications it is observed that using 360 ° cameras are advantageous over using narrow field of view ( 90 ° or less ) cameras. OmniCV ROS Nodes provide an efficient and easy to use the setup for all the different kinds of interconversions related to 360|deg| images. This makes it easy for researchers and developers to perform these interconversions by integrating the OmniCV ROS nodes into their existing ROS based projects.
Build The ROS Nodes¶
To build the OmniCV ROS nodes follow these steps.
Create a folder named omnicv in your ros workspace where you have your other ros packages.
roscd src/
mkdir omnicv
Add the contents present inside ros_files folder to the omnicv folder created in the previous step.
Build the workspace.
cp OmniCV/ros_files/ [PATH TO ROS WORKSPACE]/src/omnicv/
roscd
catkin_make
omnicv_equirect2fisheye node¶
ROS node to convert equirectangular image to fisheye image
$rosrun omnicv equirect2fisheye [mode] [outH] [outW]
mode (required argument): Camera model to be used for convertion of equirectangular to fisheye image.
mode = 0 - Use Unified Camera Model
mode = 1 - Use Extended Unified Camera Model
mode = 2 - Use Field of View camera model
mode = 3 - Use Doubel Sphere camera model
outH (optional argument) : Output image height. (Integer value) outW (optional argument) : Output image width. (Integer value)
Topics that the node subscribes to
/omnicv/equirect : Equirectangular image data to be used as input.
/omnicv/equirect2fisheye/alpha : Rotation about x-axis.
/omnicv/equirect2fisheye/beta : Rotation about y-axis.
/omnicv/equirect2fisheye/gamma : Rotation about z-axis.
/omnicv/equirect2fisheye/f : Focal length.
/omnicv/equirect2fisheye/xi : Distortion parameter for UCM model.
/omnicv/equirect2fisheye/a_ : Distortion parameter for EUCM model.
/omnicv/equirect2fisheye/b_ : Distortion parameter for EUCM model.
/omnicv/equirect2fisheye/w_ : Distortion parameter for FOV model.
Topics that the node publishes to
/omnicv/fisheye : Generated fisheye image
Note
All the topics other than /omnicv/equirect have corresponding message type of std_msgs/Float32.
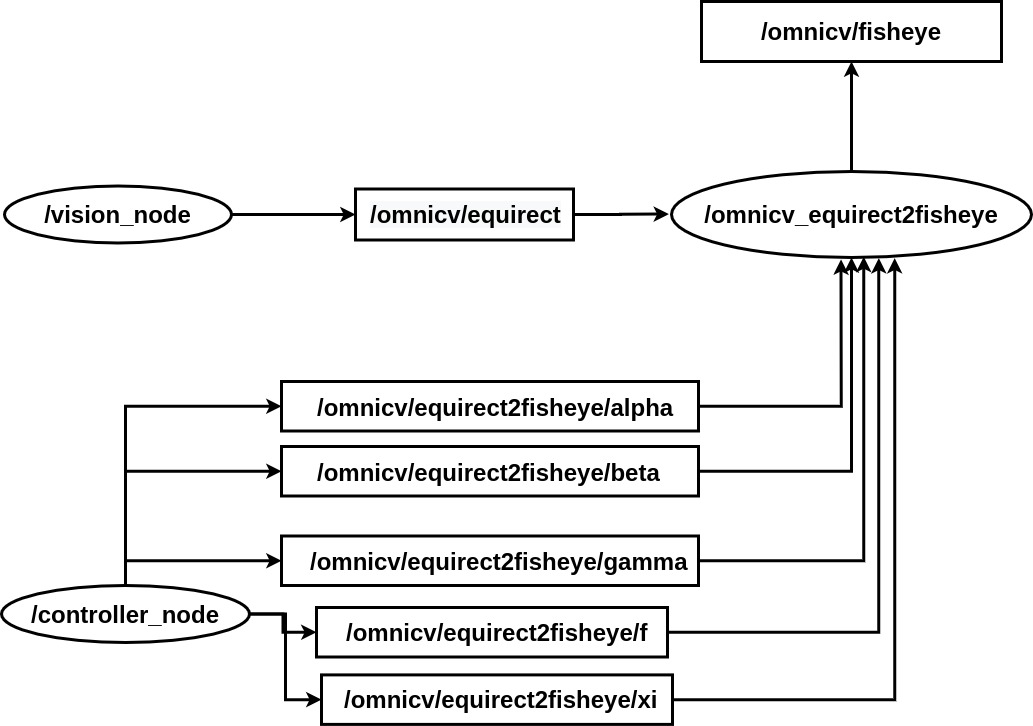
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶
omnicv_equirect2persp node¶
ROS node to conver Equirectangular image to Perspective image
$rosrun omnicv equirect2persp [outH] [outW]
outH (optional argument) : Output image height. (Integer value) outW (optional argument) : Output image width. (Integer value)
Topics that the node subscribes to
/omnicv/equirect : Equirectangular image data to be used as input.
/omnicv/equirect2persp/alpha : Rotation about x-axis.
/omnicv/equirect2persp/beta : Rotation about y-axis.
/omnicv/equirect2persp/gamma : Rotation about z-axis.
Topics that the node publishes to
/omnicv/persp : Generated perspective image
Note
All the topics other than /omnicv/equirect have corresponding message type of std_msgs/Float32.
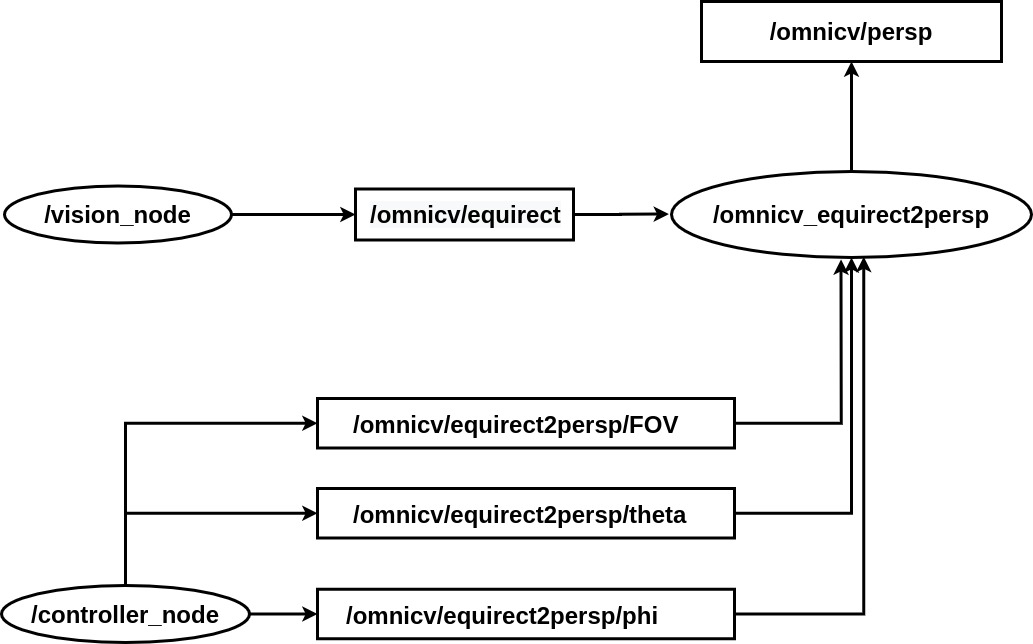
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶
omnicv_equirect2cubemap node¶
ROS node to convert equirectangular image to cubemap
$rosrun omnicv equirect2cubemap [cube_side] [modif_flag] [dice]
cube_side (optional argument) : Cubemap side length (Integer value) modif_flag (optional argument) : Flag to modify the output mode (bool value)
modif_flag = 0 - For camera position perpendicular to ground.
modif_flag = 1 = For camera position parallel to ground.
Topics that the node subscribes to
/omnicv/equirect : Equirectangular image data to be used as input.
Topics that the node publishes to
/omnicv/cubemap : Generated cubemap image
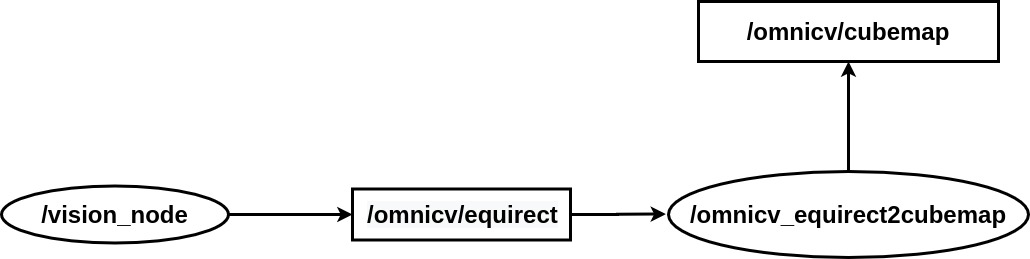
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶
omnicv_cubemap2persp node¶
ROS node to conver Cubemap image to Perspective image
$rosrun omnicv cubemap2persp [outH] [outW]
outH (optional argument) : Output image height. (Integer value) outW (optional argument) : Output image width. (Integer value)
Topics that the node subscribes to
/omnicv/cubemap : Equirectangular image data to be used as input.
/omnicv/cubemap2persp/alpha : Rotation about x-axis.
/omnicv/cubemap2persp/beta : Rotation about y-axis.
/omnicv/cubemap2persp/gamma : Rotation about z-axis.
Topics that the node publishes to
/omnicv/persp : Generated perspective image
Note
All the topics other than /omnicv/cubemap have corresponding message type of std_msgs/Float32.
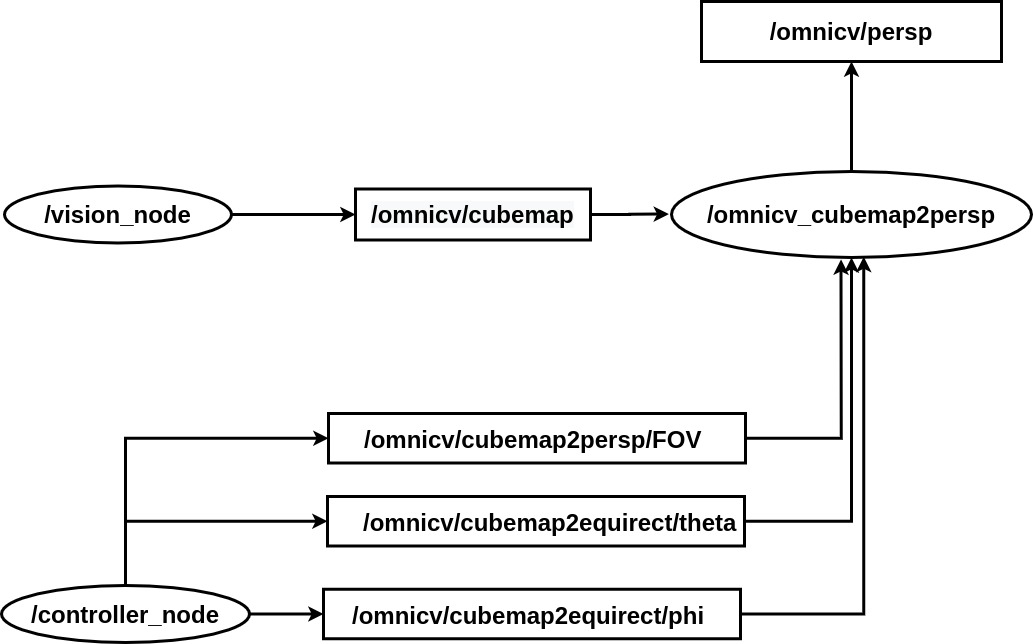
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶
omnicv_cubemap2equirect node¶
ROS node to convert equirectangular image to cubemap.
$rosrun omnicv cubemap2equirect [outH] [outW]
outH (optional argument) : Output image height. (Integer value) outW (optional argument) : Output image width. (Integer value)
Topics that the node subscribes to
/omnicv/cubemap : Cubemap image data to be used as input.
Topics that the node publishes to
/omnicv/equirect : Generated Equirectangular image
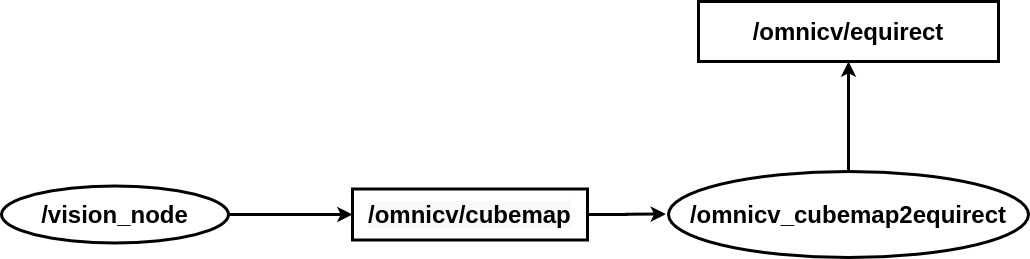
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶
omnicv_fisheye2equirect node¶
ROS node to convert fisheye image to equirectangular image.
$rosrun omnicv fisheye2equirect [outH] [outW]
outH (optional argument) : Output image height. (Integer value) outW (optional argument) : Output image width. (Integer value)
Topics that the node subscribes to
/omnicv/fisheye : Fisheye image data to be used as input.
Topics that the node publishes to
/omnicv/equirect : Generated Equirectangular image
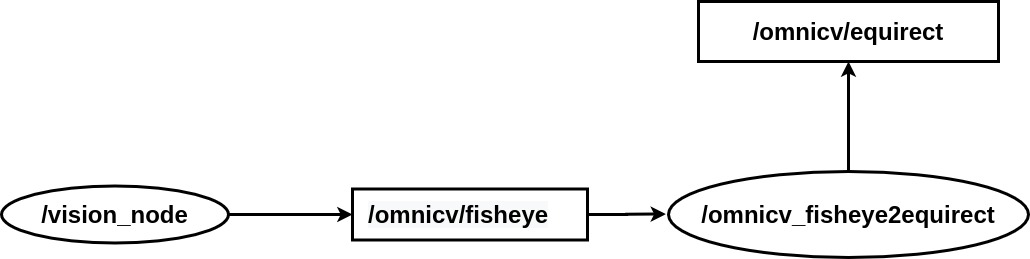
Graph showing the above explained topics and nodes. The nodes are represented by bubbles and topics by rectangles.¶